

Adequate biomimicry is a practice in which robots learn from and mimics humans to make machines more like humans. Developing such a robotic manipulator is time-consuming: It includes long, manual iteration cycles of designing, fabricating, and evaluating guided by human intuition.
Most of the robotic hands are designed for performing specific tasks. These hands have a high number of degrees of freedom and a complex control system. Although creating such hands is a tedious process. Existing methods battle the trade-off between the complexity of the designs and the practical constraints of manufacturing and contact handling.
To optimize the shape and control of a robotic manipulator for a specific task, a new method has been designed by MIT scientists that acts as an end-to-end differentiable framework for contact-aware robot design.
Scientists created a single robotic finger design to flip over a box on the ground for testing their method. An algorithm optimized the mechanical finger to hook onto the box’s back surface and flip it.
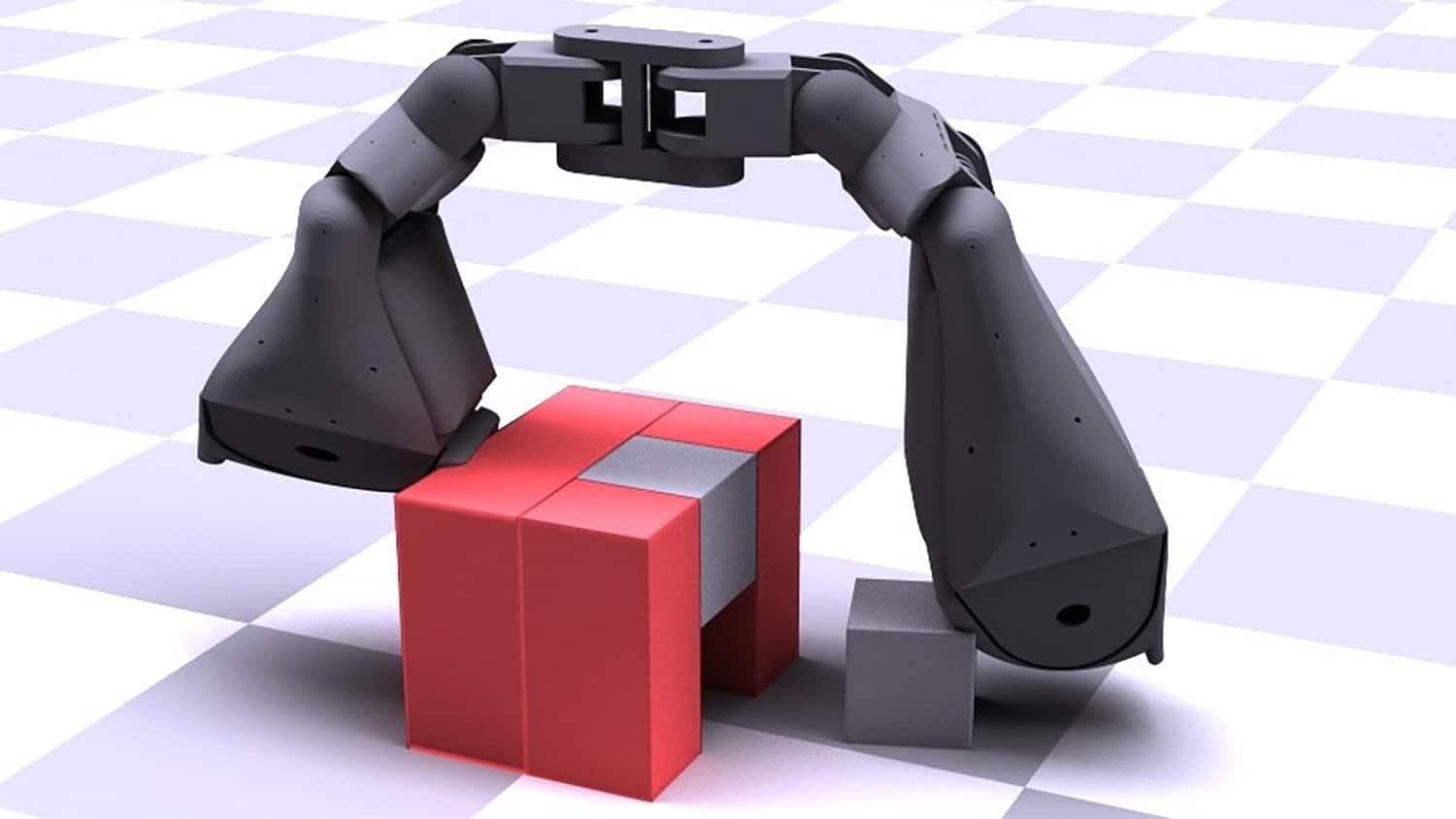
In addition to that, a model was created for the assembly task. In this model, a two-finger design put a small cube into a larger, movable mount. Because of the different lengths of the fingers, the larger and flatter surfaces of the fingers helped stably push the object.
Furthermore, a technique called ‘cage-based deformation’ was used to create more involved robot manipulators. The method allows the user to change or deform the shape in the meantime.
The team developed a simulator to simulate the manipulator design and control on a task, providing a performance score.
Jie Xu, MIT Ph.D. student and lead author on a new paper about the research, said, “Using these simulation tools, we don’t need to evaluate the design by manufacturing and testing it in the real world. In contrast to reinforcement learning algorithms that are popular for manipulation but are data-inefficient, the proposed cage-based representation and the simulator allow for the use of powerful gradient-based methods. We not only find better solutions but also find them faster. As a result, we can quickly score the design, thus significantly shortening the design cycle.”
Journal Reference:
- Jie Xu et al. An End-to-End Differentiable Framework for Contact-Aware Robot Design. Paper
Continue reading Representing robotic manipulator using a novel method on Tech Explorist.
0 comments:
Post a Comment